| Главная | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Основы теории сейсмостойкости сооружений2.5.2. Применение метода разложения по собственным Для решения системы уравнений (2.38) или (2.39) используем известный в динамике сооружений метод представления решения в виде разложения по собственным формам колебаний. Представим искомое решение в виде X→=Vq→. (2.40)Здесь V - матрица, составленная из собственных векторов системы уравнений движения V→TK = {X1k, X2k,…,Xnk}: V =
q→ - вектор обобщенных (главных) координат: q→T(t) = {q1(t), q2(t),...,qn(t)}, 37 Напомним, что величины XKiпредставляют собой амплитудные значения перемещений к-ой массы при колебаниях системы по i-ой собственной (главной) форме и называются амплитудными коэффициентами формы. qi(t) - функция времени, определяющие закон изменения во времени амплитудных коэффициентов формы. Причем, как известно, собственные векторы обладают свойством обобщенной ортогональности, т.е.
Таким образом, исходя из (2.40), имеем
Иллюстрация этого представления приведена на рис. 2.9 для системы с пятью степенями свободы. 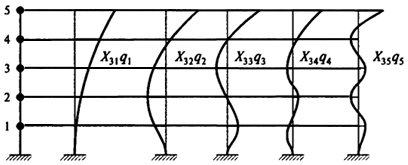 Рис. 2.9. Главные (собственные) формы колебаний системы с 5-ю степенями свободы Собственные векторы системы с п степенями свободы определяются из решения алгебраических задач на собственные значения K →Xi - ωi2M →Xi = 0(2.43)если используется система уравнений движения (2.38), или LM →Xi - (1/ωi2) →Xi = 0(2.44)если используется система уравнений (2.39). Здесь ωi, - собственные частоты колебаний. В развернутом виде эта система уравнений записывается следующим образом:
где λi= 1/ωi2. 38 Для вывода уравнений, определяющих обобщенные координаты qi, удобнее воспользоваться формой представления уравнений движения в виде (2.38).
Подставляя сюда (2.40) и умножая слева на матрицу VT, получаем Заметим, что в данном случае задача на собственные значения формулируется в виде KV-MVΩ2 = 0,(2.47)где Ω2 - диагональная матрица частот собственных колебаний: Ω2 =
С учетом ортогональности форм собственных колебаний (2.42) для произведения матриц VTM V можно получить следующее представление VTM V=Mq(2.49)где Мq - диагональная матрица обобщенных масс Мq =
Мi - обобщенные массы, определяемые выражением
Тогда с учетом (2.47) и (2.49), имеем VtKV = VTM VΩ2 =MqΩ2=Kq(2.52)Диагональная матрица Kq называется матрицей обобщенной жесткости и легко определяется с помощью формул (2.48) и (2.50) Kq =
39 Введем представление VTM Δ..→ = Q→,(2.54)где компоненты вектора Q→определяются выражением
Тогда нетрудно показать, что система уравнений (2.46) распадается на п независимых уравнений, каждое из которых определяет обобщенную координату qiотвечающую i-ой форме колебаний. Действительно, используя введенные представления, записываем (2.46) в виде Mqq..→ + Kqq→ = - Q→. (2.56)Учитывая диагональное строение матриц Мq (2.50) и Kq (2.53), имеем q..i + ωi2qi = - (Qi / Mi)(2.57)Таким образом, задача построения решения уравнений движения системы с п степенями свободы сводится к решению задачи для линейного осциллятора, описанного выше. 40 |